简明控制理论:写在电磁悬挂国产化的2025年
PUBLIC自己本来算是计算机的背景,感谢这个教育让我有了一种“离散”的世界观。
后面做机器人,接触到很多控制背景的朋友,简单了解下发现这是一个和计算机相爱相杀的学科。
互相重复且独立地发明了不少相似的概念。更重要地,展示了一种“连续”的世界观。
这里简单记录一下控制里面比较核心的美妙观点。起码回答,什么是传递函数。
Read more...自己本来算是计算机的背景,感谢这个教育让我有了一种“离散”的世界观。
后面做机器人,接触到很多控制背景的朋友,简单了解下发现这是一个和计算机相爱相杀的学科。
互相重复且独立地发明了不少相似的概念。更重要地,展示了一种“连续”的世界观。
这里简单记录一下控制里面比较核心的美妙观点。起码回答,什么是传递函数。
Read more...Chris是谁?
一系列光环的大佬。
记录这个文章的起点是,发现Chris在和geohot(重新认识geohot中的geohot)就什么是AI compiler的终极形态的讨论:
可以说是正统派和野路子的正面交锋/交流。
Chris写了一个系列文章:Democratizing AI Compute,讲述了自己为什么要创业做Mojo。
读完之后,感觉终于解决了我一个长久的困惑,TVM/XLA/Triton/cuTile…似乎都在解决一个问题,AI编译器,他们究竟是什么关系。
所幸大佬站在浪潮之巅,亲身经历这一切,并慷慨地写了一个像是自传一样的总结,让我可以管中窥豹。
记录一下。
Read more...之前在学校的时候用ROS,在DJI的时候用一整套DJI自研的中间件。
大家都认可ROS的易用性,但同时觉得它几乎成了“低效”和“实验室原型”的代名词。
所以在产品上,DJI毫不犹豫地选择了高效路线,搭建了一整套自研中间件。
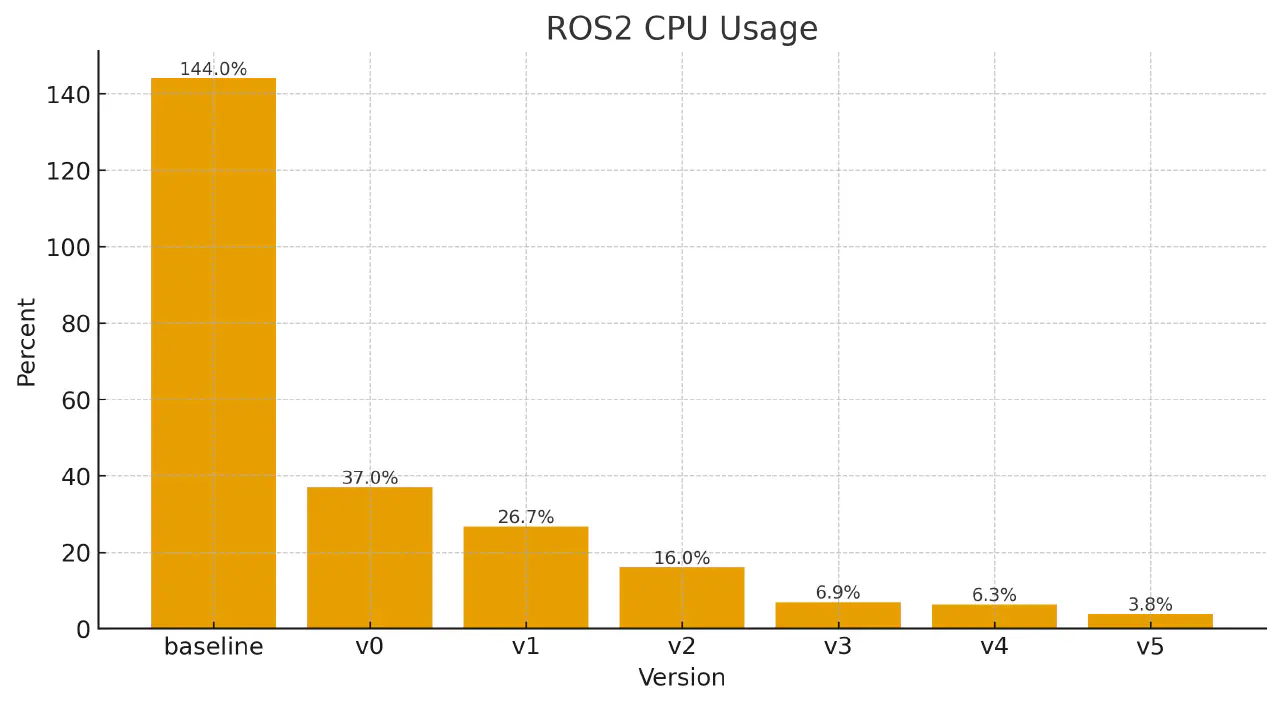
我长期关注C++的zero-overhead principle信条,所以始终觉得很不服气:为什么中间件就不能既好用,又高效?
很有趣,最近用了一些时间做了一些实验,感觉整个过程是一个很值得讨论的技巧分享。
所以记录下来。
先说结论:在一个接近真实场景的case里面,从第一个版本的144% CPU占用,优化到了3.8%,提高了接近40倍的效率。
一直想记录一下这一点。
现在互联网上很讲究“觉醒”,类似忽然发现小时候习以为常的事情,其实是PUA什么的。
虽然用在这里不是很恰当,但是感觉在我所需要的领域里面,OOP确实带来的都是不好的体验。
但是这个不好来自哪里,做了很多次尝试才慢慢清晰。
这个起点应该是从从SICP说起:重新学习(函数式)编程开始,到今天看到一个youtube视频Casey Muratori – The Big OOPs: Anatomy of a Thirty-five-year Mistake – BSC 2025觉得值得写下来记录一下。
Read more...这个访谈似乎在张小珺自己的一系列访谈里,显得比较突出。
我自己是在听到一半的时候,决定要记录一下。
主要是被张祥雨清晰的表达震撼,明显感觉他的表达的context很长,能维持一个很长的逻辑链,有的逻辑分支走完了还能回溯。
说回内容。
可以概括为,一个发自内心对智能有追求的人,是如何对AI发展中的节点进行审美的。
Read more...如何用比较数学和推理的方法去理解和掌握音乐。
说一个有争议的话题,类似中医和西医。不分高下地做一个对比,西医更像是演绎法,中医更像是归纳法。
就像是how first principles thinking fails里面提到的inductive v.s. deductive。
不是说归纳法不好,而是演绎法可能更适合我这样的天赋不佳的人去理解。你跟我说,“感觉一下”,我太难理解了。
Building from the Scratch是模仿Linux From Scratch (LFS)。
Read more...一条漂亮干净的路径,通往机器人的高可靠性终点。
从能吃下数据的尺度来排序:
Internet-Scale Data
无监督的训练掌握 常识
DINOv2变成de facto image encoder,VLM公认有“常识”,所以可以帮助action变成VLA
自动驾驶中用视频生成做模拟器,可以不只利用驾驶数据,更多普通数据可以包含更多自然的知识
人类示教数据
模仿学习的数据介绍 领域知识
Behavior Cloning + Video Generation-based Augmentation
更fancy的说法是world model,或者LeCun的JEPA
打分数据
在两个采样中,A比B更好,表达 偏好
用交替训练的方法,同时训练Reward Model,以及用这个Reward Model支持RL
有一个机器臂的工作用了这个方法,HiL-serl
看起来能统一地解决自动驾驶和机械臂的问题。
今天主要讨论模仿学习如何结合视频生成解决分布漂移的死结。
Read more...李光耀的采访,很诚恳,听起来也是挺客观的。
如果说他真的把新加坡当作自己的家,他应该算是一个努力过好自己生活的人。
很久之前看的,最近想起来把记录摘出来,竟然发现微信读书下架了,幸好一些笔记还在。
Read more...温铁军的视角中,农村问题等于中国的现代化问题,中国的现代化问题等于农村问题。怎么提供足够大的“发展”使得农民和农村资源有新的加入经济的角色。
在理想视角里面,我们可以认为现代化是一个单向的农村劳动力被城市需求转化为城市劳动力的过程,而城市劳动力是由现在的出口需求支撑的,这种支撑可以持续吗,如果不是,如何持续下去。
温铁军的研究展示出一种调研大于理论的求真风格,仅以农村纪实的叙事角度来看,也是很好的文本资料。
Read more...我记得哪个盲人的电影里面说过,对于盲人来说,正常人像是不同的物种,更像是“超人”。一个印象深刻的画面。
最近忽然发现,对于会下围棋的人来说,一眼看出局部的死活,棋的拙行,不也是像超人一样吗。
再想到,其实写代码也类似,对于外人来说,能写一个有功能的app可能也像超人吧。
那种,别人自然流露,自己却完全雾里云里的体验。
可能就像是面对外星人或者超人一样吧。
原来又是一个拙劣的“观察”。